-
- Downloads
active sensing
Showing
- .gitignore 2 additions, 0 deletions.gitignore
- index.md 1 addition, 1 deletionindex.md
- topics/03_active/img/Hughes_TA_3DSensor_PhaseAngleCalculation_moreDetail_slower.gif 0 additions, 0 deletions...s_TA_3DSensor_PhaseAngleCalculation_moreDetail_slower.gif
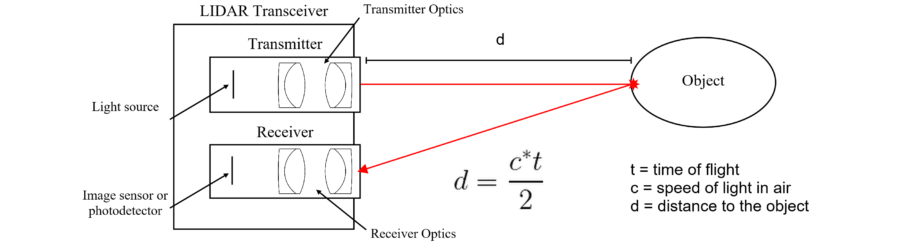
- topics/03_active/img/lidar.png 0 additions, 0 deletionstopics/03_active/img/lidar.png
- topics/03_active/img/tof_camera.png 0 additions, 0 deletionstopics/03_active/img/tof_camera.png
- topics/03_active/index.md 18 additions, 2 deletionstopics/03_active/index.md
- topics/05_processing/.gitkeep 0 additions, 0 deletionstopics/05_processing/.gitkeep
- topics/05_processing/img/conv.gif 0 additions, 0 deletionstopics/05_processing/img/conv.gif
- topics/05_processing/index.md 0 additions, 33 deletionstopics/05_processing/index.md
{kind=link}

1.23 MiB
topics/03_active/img/lidar.png
0 → 100644
{kind=link}
63 KiB
topics/03_active/img/tof_camera.png
0 → 100644
{kind=link}

104 KiB
topics/05_processing/.gitkeep
deleted
100644 → 0
topics/05_processing/img/conv.gif
deleted
100644 → 0
{kind=link}

443 KiB
topics/05_processing/index.md
deleted
100644 → 0