-
- Downloads
teensy rips, one hundred, and link to post
Showing
- README.md 38 additions, 26 deletionsREADME.md
- usb_serial/code/serial_sink/plot_stamps.py 44 additions, 0 deletionsusb_serial/code/serial_sink/plot_stamps.py
- usb_serial/code/serial_sink/sink.py 4 additions, 42 deletionsusb_serial/code/serial_sink/sink.py
- usb_serial/code/serial_source_teensy/.gitignore 5 additions, 0 deletionsusb_serial/code/serial_source_teensy/.gitignore
- usb_serial/code/serial_source_teensy/include/README 39 additions, 0 deletionsusb_serial/code/serial_source_teensy/include/README
- usb_serial/code/serial_source_teensy/lib/README 46 additions, 0 deletionsusb_serial/code/serial_source_teensy/lib/README
- usb_serial/code/serial_source_teensy/platformio.ini 14 additions, 0 deletionsusb_serial/code/serial_source_teensy/platformio.ini
- usb_serial/code/serial_source_teensy/src/COBSUSBSerial.cpp 96 additions, 0 deletionsusb_serial/code/serial_source_teensy/src/COBSUSBSerial.cpp
- usb_serial/code/serial_source_teensy/src/COBSUSBSerial.h 41 additions, 0 deletionsusb_serial/code/serial_source_teensy/src/COBSUSBSerial.h
- usb_serial/code/serial_source_teensy/src/cobs.cpp 72 additions, 0 deletionsusb_serial/code/serial_source_teensy/src/cobs.cpp
- usb_serial/code/serial_source_teensy/src/cobs.h 24 additions, 0 deletionsusb_serial/code/serial_source_teensy/src/cobs.h
- usb_serial/code/serial_source_teensy/src/main.cpp 36 additions, 0 deletionsusb_serial/code/serial_source_teensy/src/main.cpp
- usb_serial/code/serial_source_teensy/test/README 11 additions, 0 deletionsusb_serial/code/serial_source_teensy/test/README
- usb_serial/images/2024-01-04_teensy-usb-128.png 0 additions, 0 deletionsusb_serial/images/2024-01-04_teensy-usb-128.png
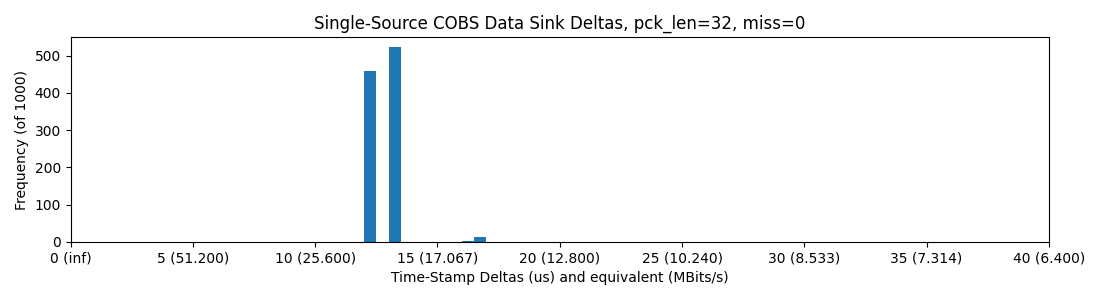
- usb_serial/images/2024-01-04_teensy-usb-32.png 0 additions, 0 deletionsusb_serial/images/2024-01-04_teensy-usb-32.png
- wiznet_ethernet/images/2023-12-28_ethernet-wiz-spi-01.jpg 0 additions, 0 deletionswiznet_ethernet/images/2023-12-28_ethernet-wiz-spi-01.jpg
- wiznet_ethernet/images/2023-12-28_ethernet-wiz-spi-02.jpg 0 additions, 0 deletionswiznet_ethernet/images/2023-12-28_ethernet-wiz-spi-02.jpg
usb_serial/code/serial_sink/plot_stamps.py
0 → 100644
{kind=link}

30.5 KiB
{kind=link}
31.3 KiB
{kind=link}
{kind=link}

| W: | H:

| W: | H:
{kind=link}
{kind=link}

| W: | H:

| W: | H: