Select Git revision
-
Amira Abdel-Rahman authoredAmira Abdel-Rahman authored

AI_grow.md 3.07 KiB
AI that Grows
Research and development of workflows for the co-design reconfigurable AI software and hardware.
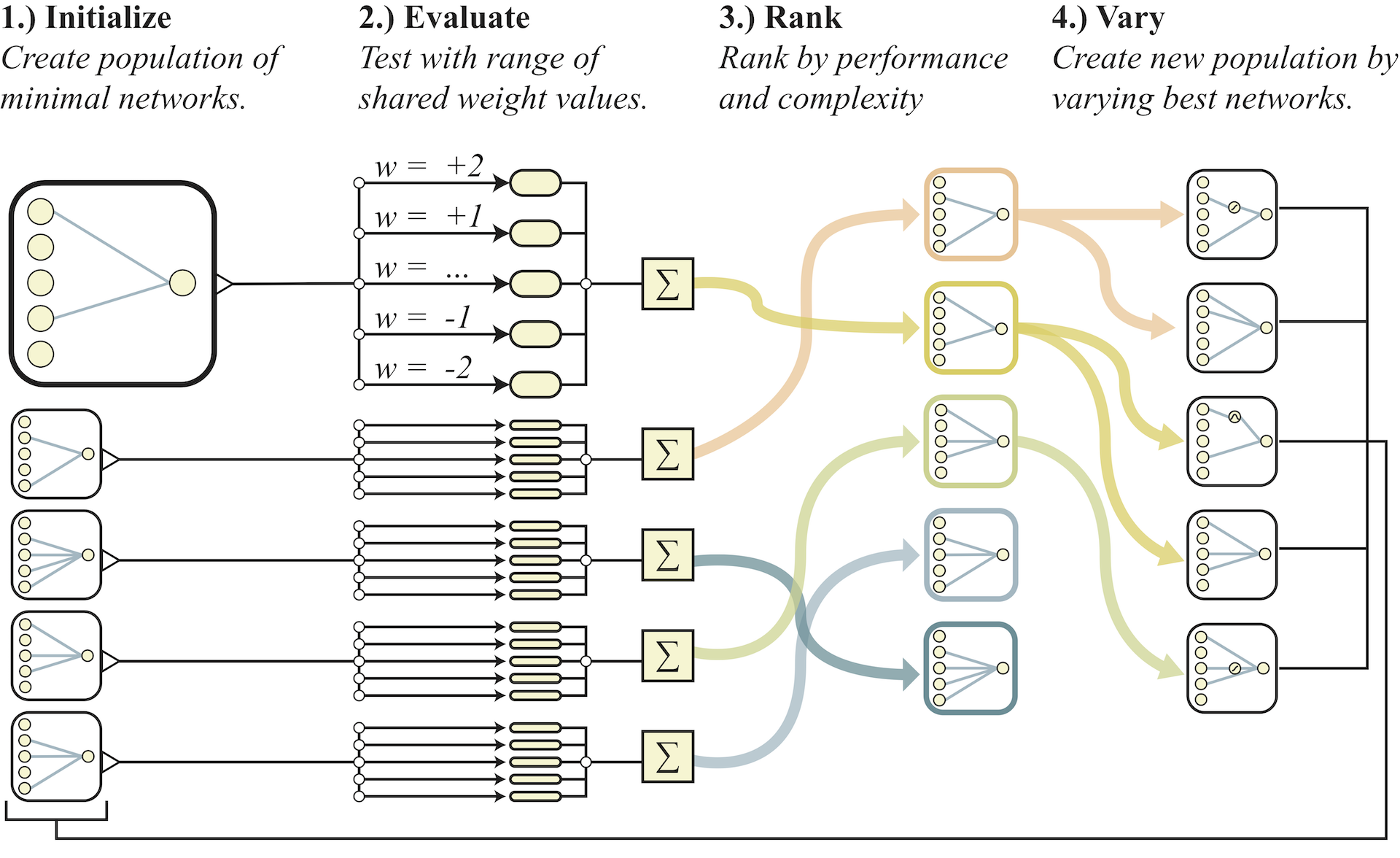
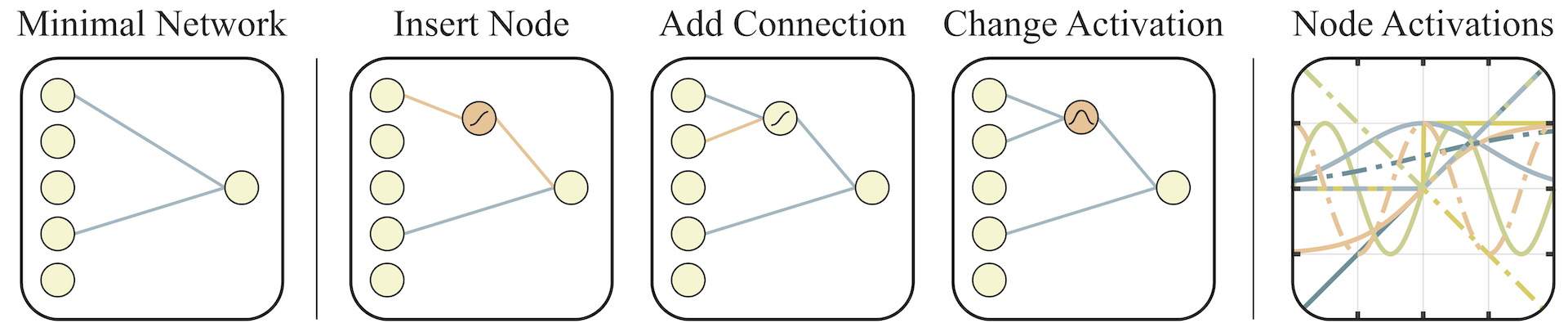
Weight Agnostic Neural Networks (WANN)
- Demo!
- "focus on finding minimal architectures".
- "By deemphasizing learning of weight parameters, we encourage the agent instead to develop ever-growing networks that can encode acquired skills based on its interactions with the environment".

Case Study Implementation: Cart-Pole Swing Up
One of the most famous benchmarks of non-linear control, there is lots of approaches including standard q-learning using a discretized state space, deep Q-learning or linear Q-learning with continuos state space.
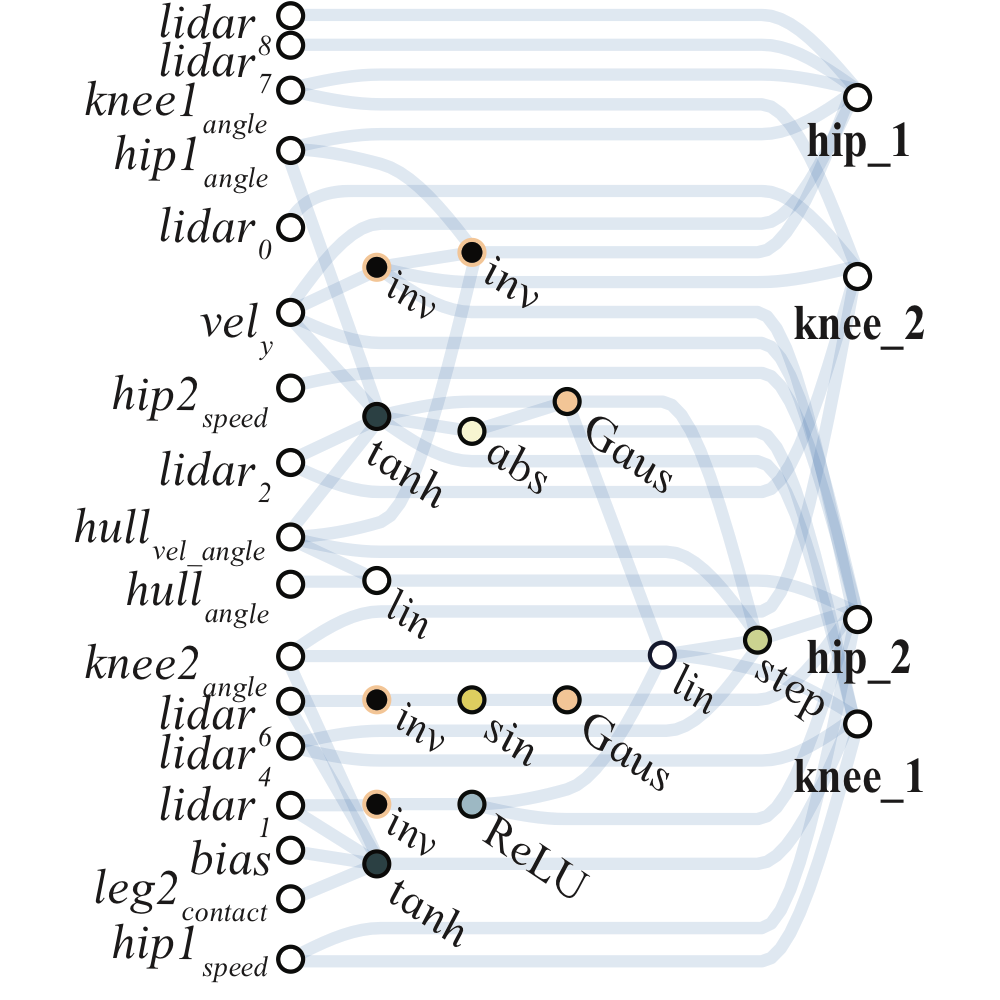
WANN is interesting as it tries to get the simplest network that uses the input sensors (position, rotation and their derivatives) to the output (force). It focuses on learning principles and not only tune weights.
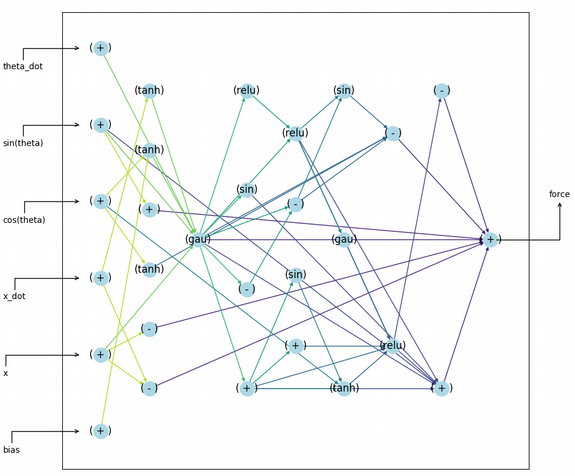
This is one of the outputs of the network and you can see because of it's simplicity it's not a black box and one can deduce the principles learnt 1(https://towardsdatascience.com/weight-agnostic-neural-networks-fce8120ee829):
- the position parameter is almost directly linked to the force, there is only an inverter which means that if the cart is on right or left of the center (+- x), it always try to go to in the opposite direction to the center.
- Based on the weight (shared weight between them all) it learned that one inverter is not enough, so it doubled it.
- It shows that it discovered symmetry: Most of them pass by a gaussian filter which basically gives the same result for -x and x, which means it's agnostic to sign of the input.
Evolution and DICE Integration
Next Steps:
- Implement WANN for rover
- Beyond WANN
-
Structure Learning
- Information gain using the ensemble method
- Data driven differential equations
-
Structure Learning
- Integrate shape and control search